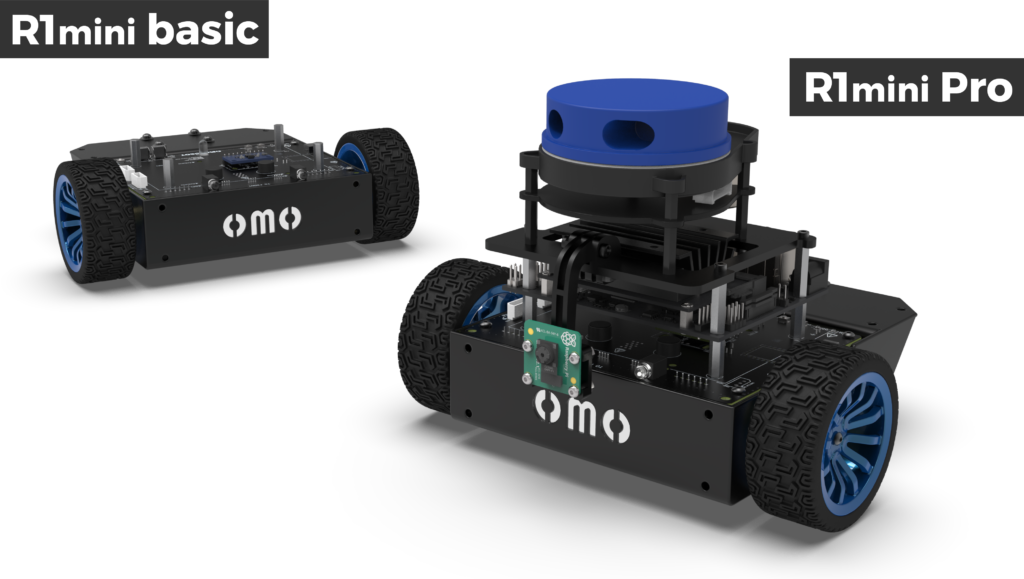
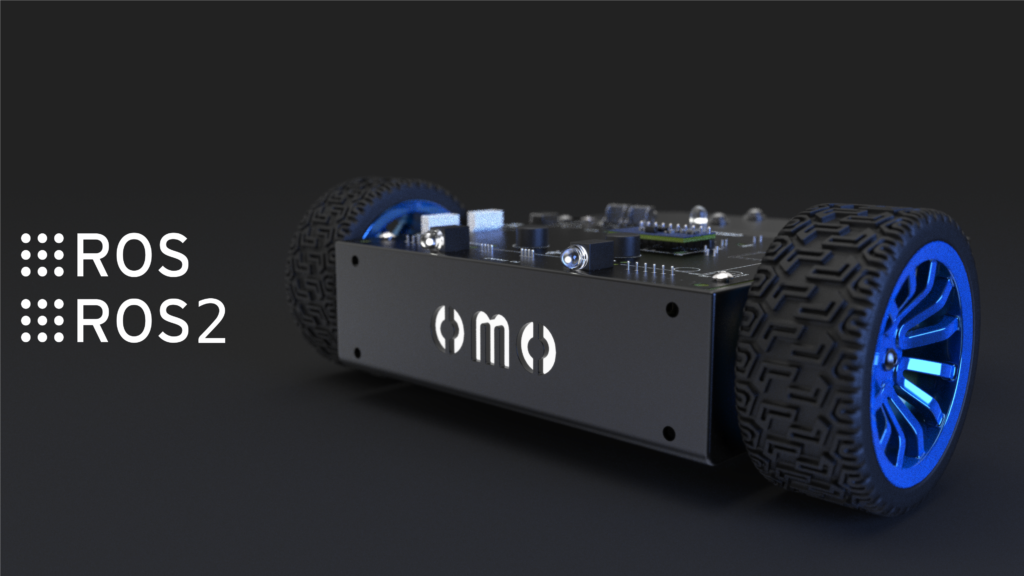
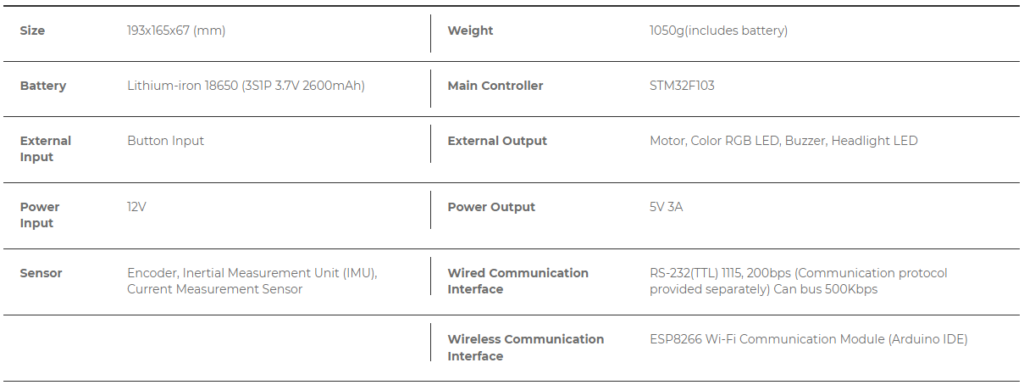
Development Platform with ROS (Robot Operating System) Support
R1 mini supports ROS and ROS2.
Free ROS Tranining
AI specialized developer uses R1 mini as a tool to teach ROS online courses.
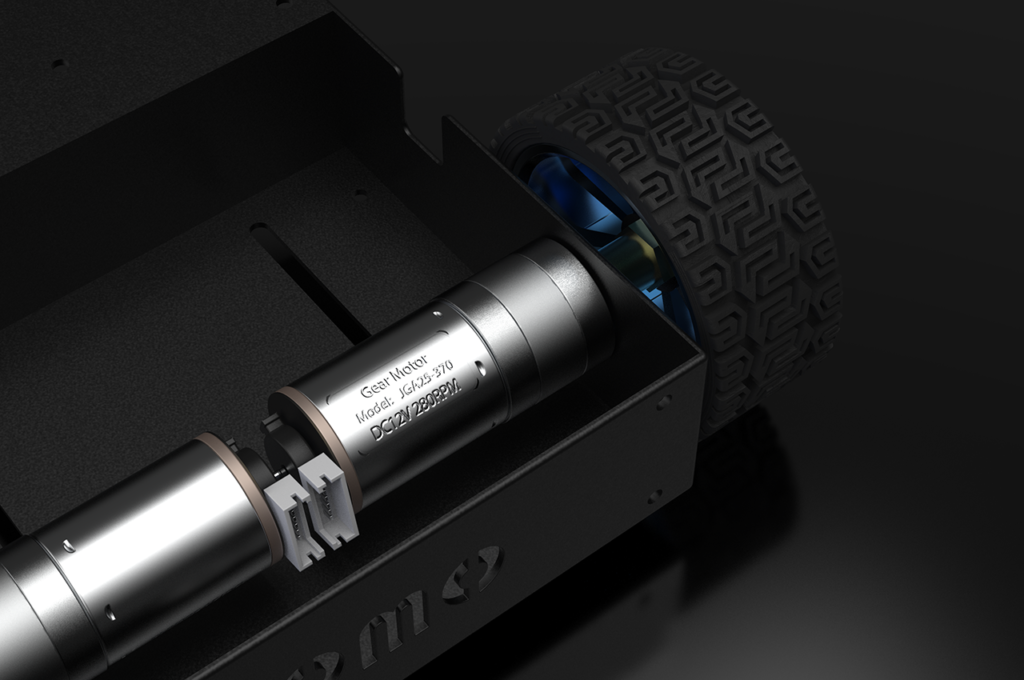
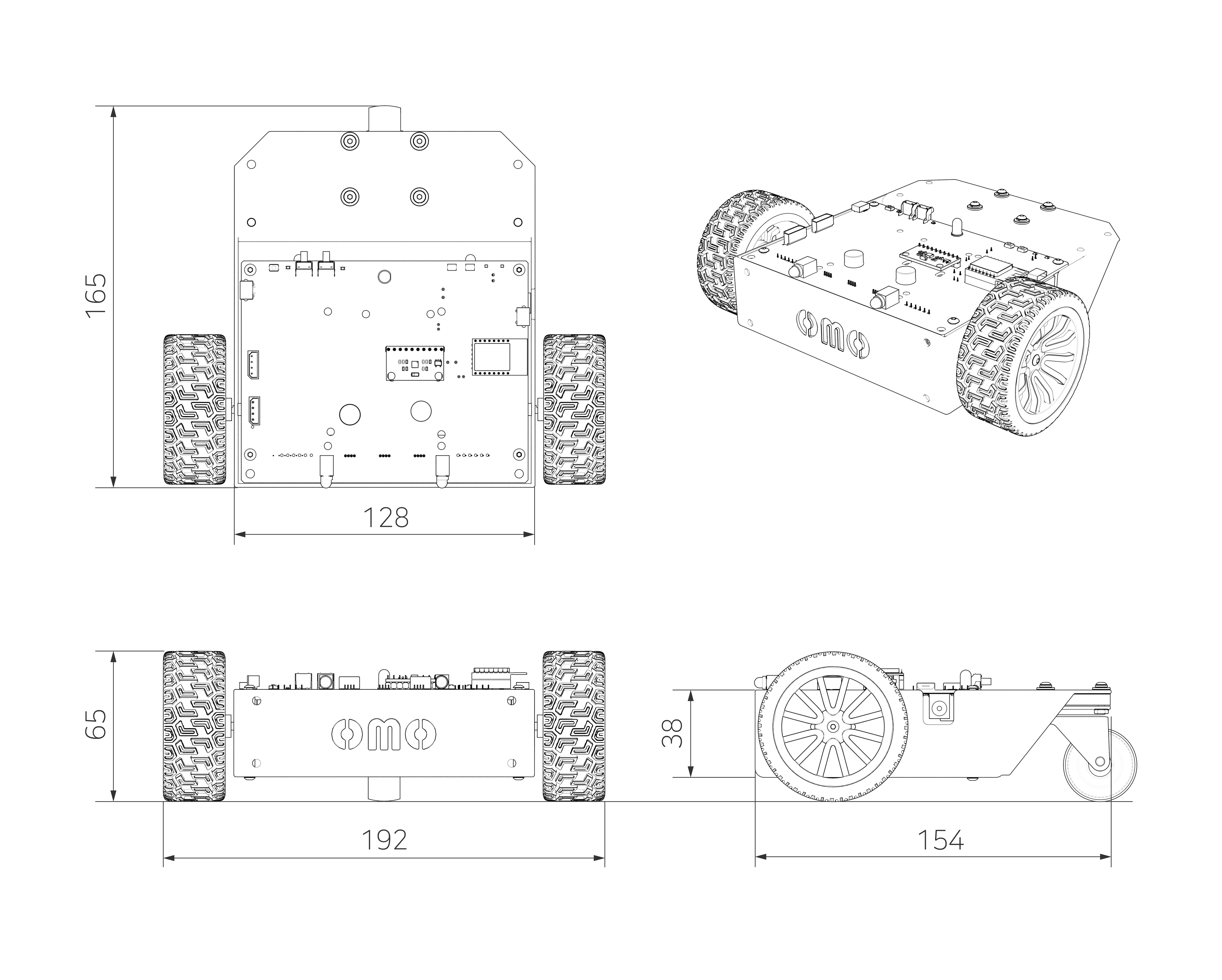
Precision Encoder Motor
Precision encoder motor makes driving stable without shaking.
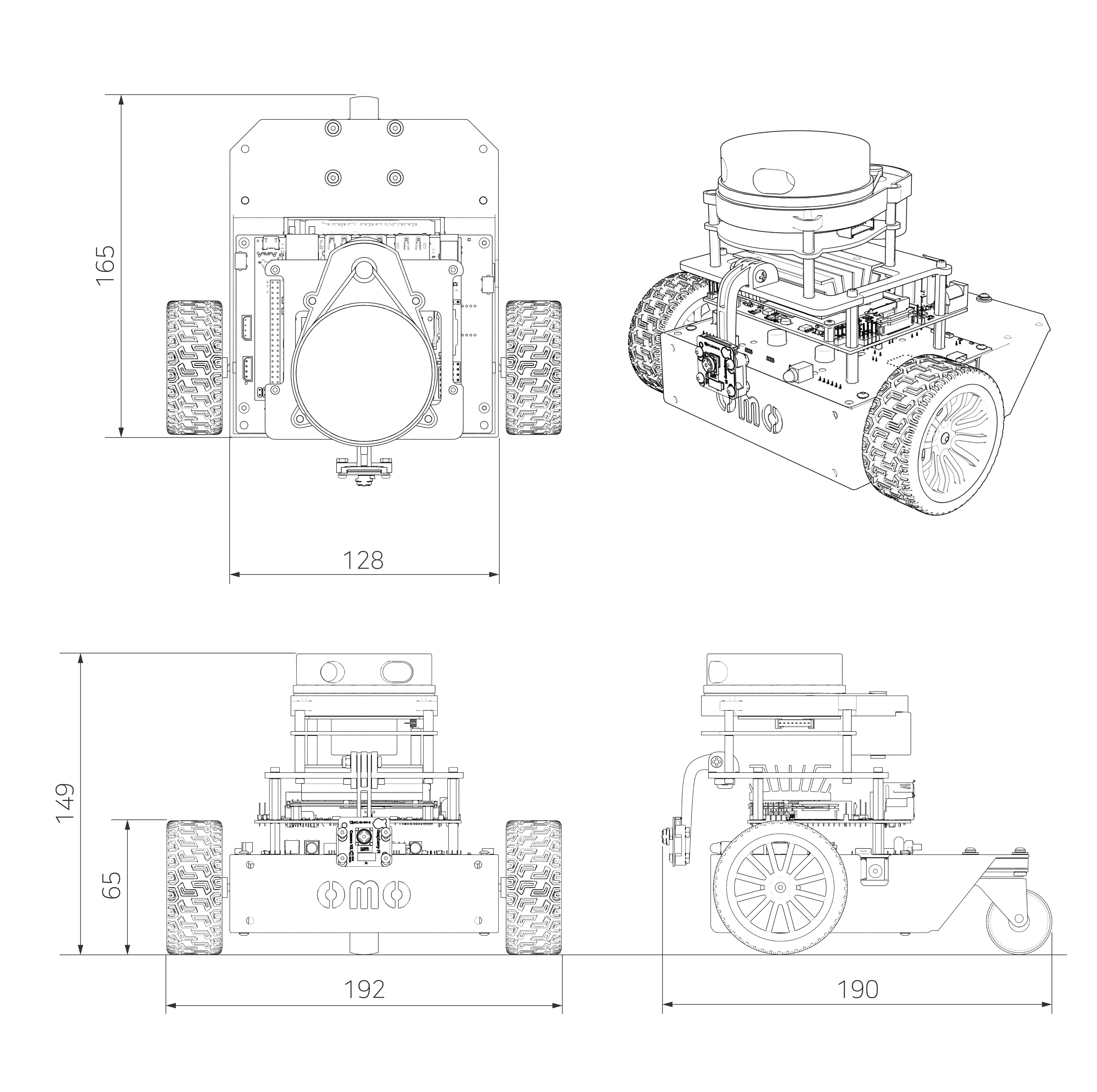
Lidar Sensor, Camera Module
360-degree lidar and acrylic plate for camera modules are provided as optional.
RGB LED Headlight Mounted
Express yourself with your R1 mini by printing different color codes through the serial port. Turn on the headlight to identify objects in dark places.
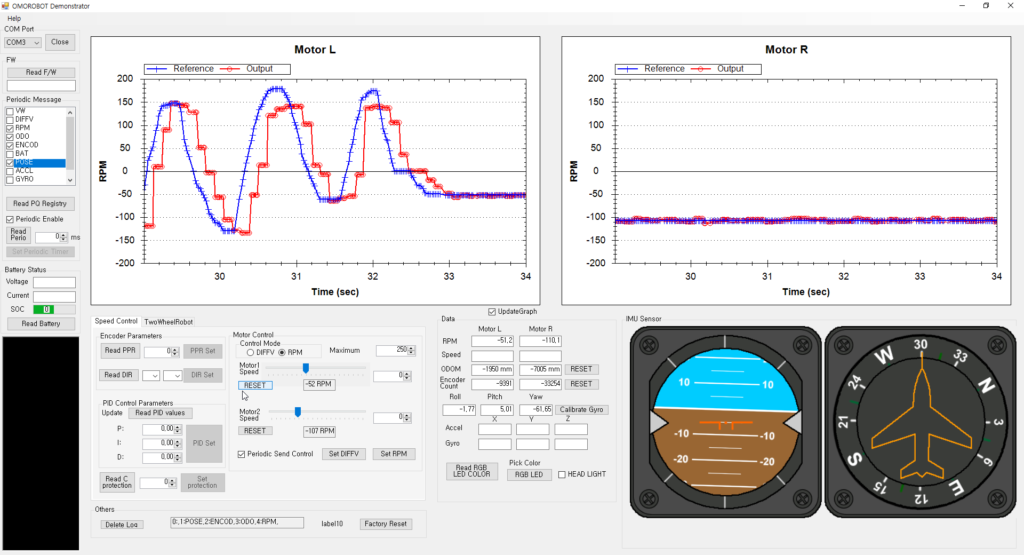
Dedicated Turning Program
Driving performance varies depending on the response characteristic of the motor. A dedicated turning program is utilized to control the robot even faster and smoother.
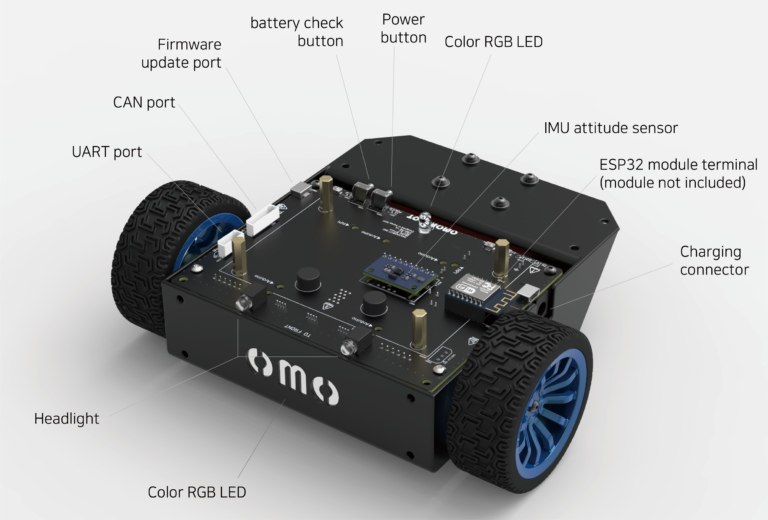
IMU Sensor, Wi-Fi Module
A Built-in IMU sensor with a Kalman filter is essential for autonomous driving.
A port is prepared for the ESP Wi-Fi module that makes users code on Arduino easily and controls it remotely through a browser from either a PC or a smartphone.
Please check the example program on the OMOROBOT Github page.
*ESP Wi-Fi model is not included in the Ri mini Basic
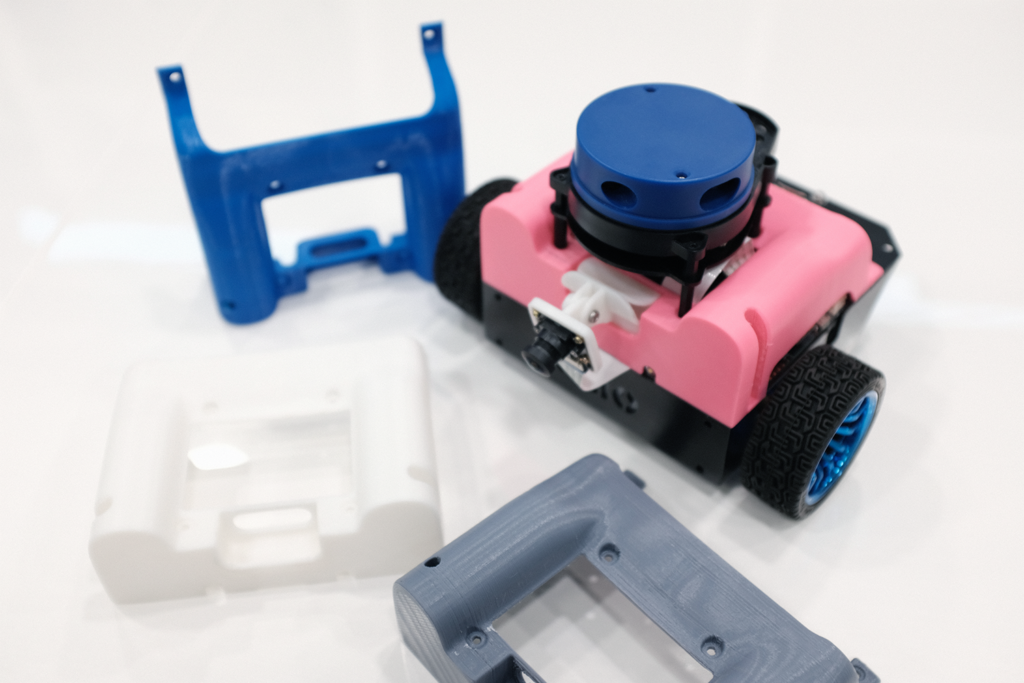
Customized 3D Printing Case
We provide 3D printing data for the R1 mini case. Personalize your R1 mini with a detachable camera module mount!
.png)